Projects
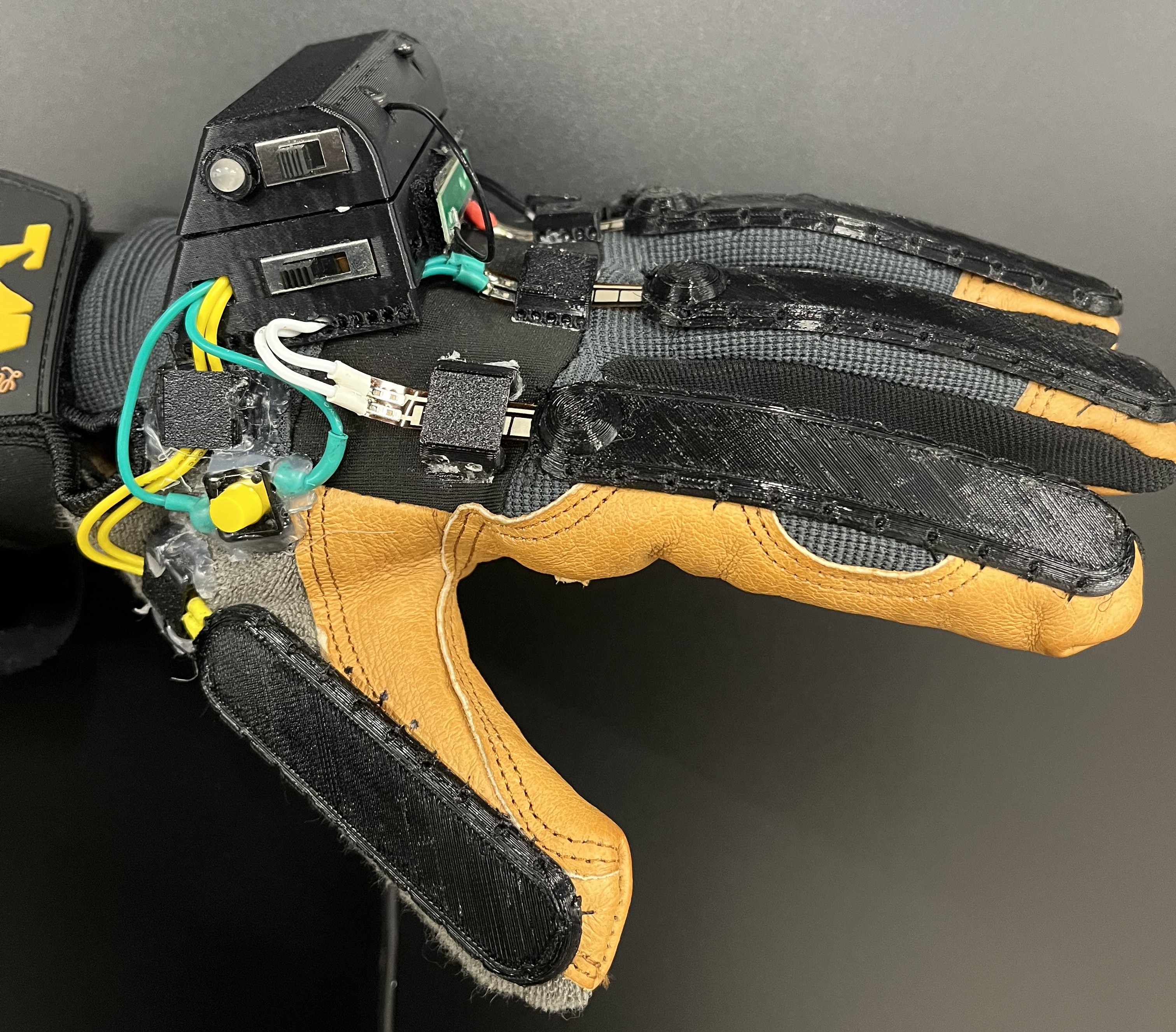
Hand Signal Interpreting Glove
ESP32
MPU6050
Flex Sensors
Signal Processing
Sensor Fusion
CNN
Arduino IDE
Wearable glove system that classifies 25 hand signals using flex sensors, an MPU6050 IMU, and an embedded 1D CNN deployed on an ESP32 for real-time wireless control.

Automated Tracking Turret
Python
OpenCV
Arduino
PID Control
Computer Vision
SolidWorks
Autonomous 3D-printed turret that uses computer vision and PID control to track and engage moving targets using real-time servo actuation.
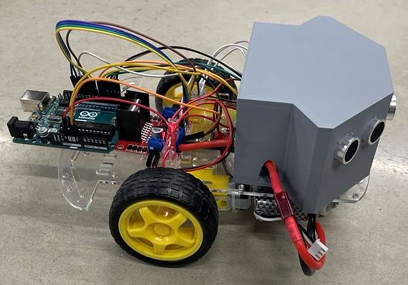
Autonomous Following RC Car
MATLAB
Simulink
PID Control
Arduino
Ultrasonic Sensors
Closed-Loop Control
Autonomous RC vehicle that follows a target using ultrasonic sensing and closed-loop PID control designed and simulated in MATLAB/Simulink.
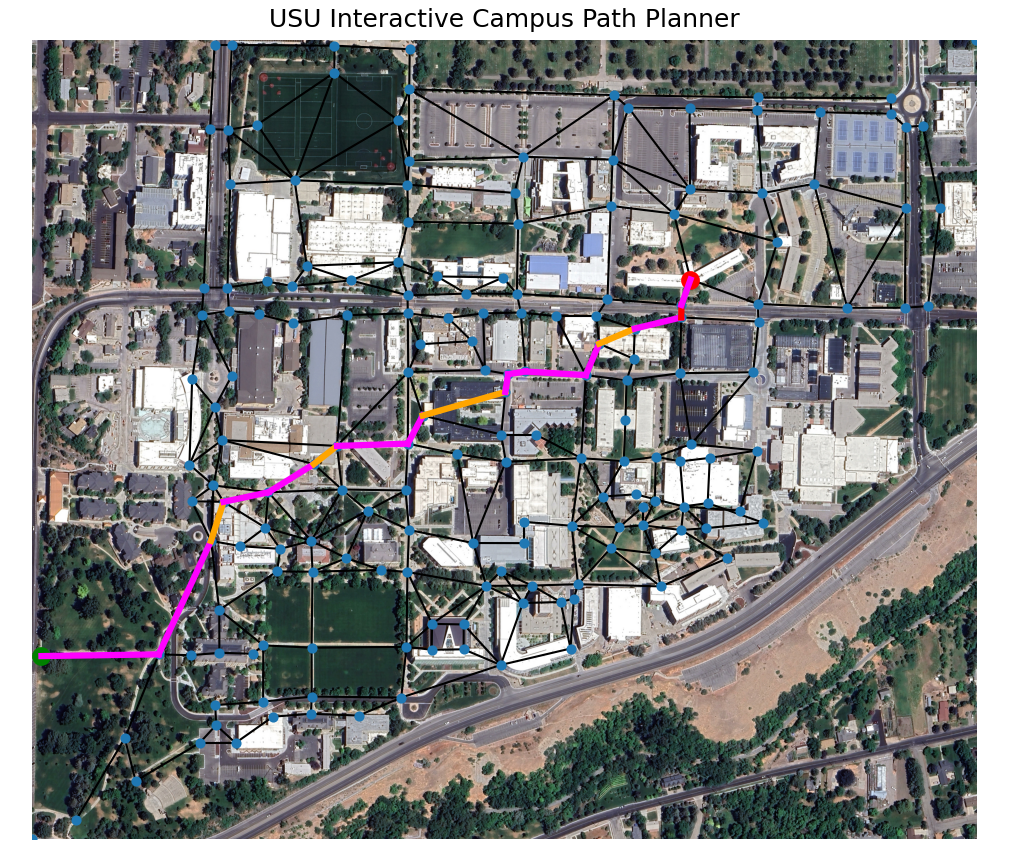
Aggie Maps
Python
A* Search
Dijkstra Algorithm
Graph Algorithms
Path Planning
GUI Development
Python-based path planning tool for Utah State University that computes optimal pedestrian routes using Dijkstra and A* search algorithms with environment-dependent cost weighting.